En avant pour Yunohost
Rédigé par Xavier - - Aucun commentaire
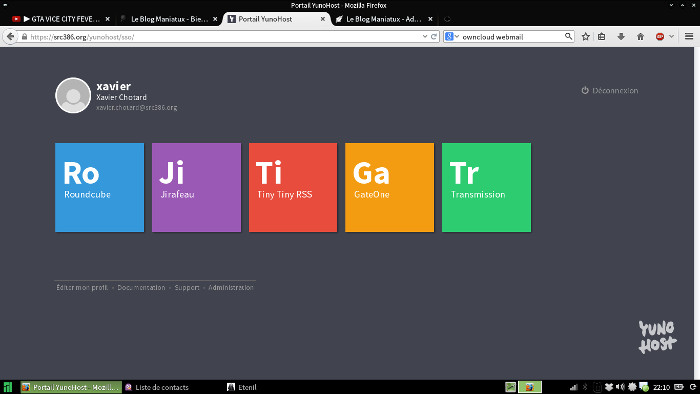
Yunohost est une distribution Linux basée sur Debian et orientée auto-hébergement. Le principe ? Debian + des services de base (mail, jabber) + un annuaire ldap + une interface web et la possibilité d'installer des "applications" en quelques clics seulement comme par exemple Owncloud. Les possesseurs de Raspberry Pi ne sont pas oubliés puisque des images sont proposées. La cerise sur le gâteau, c'est l'upnp qui permet (en théorie) d'ouvrir tout seul comme un grand les ports sur le routeur/box.
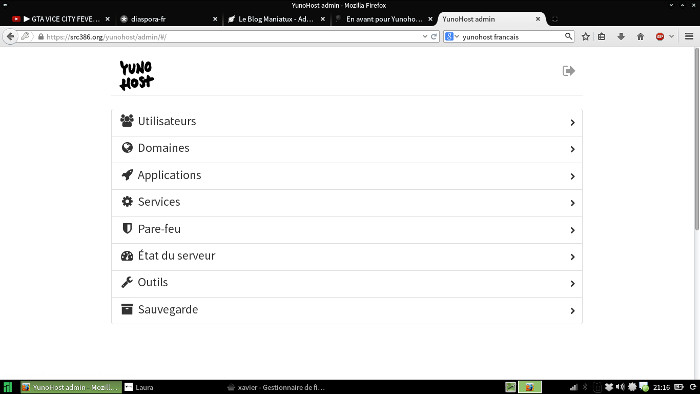
L'interface web est vraiment bien fichue et flate l'oeil. L'ensemble fonctionne bien et l'équipe du projet est très motivée. J'ai donc décidé de migrer mes services "personnels" (le blog maniatux n'est pas inclus) sur Yunohost.
Yunohost peut être installé soit à partir d'une ISO, soit à partir d'un script du moment que le serveur dispose de Debian i386 ou amd64 (malheureusement kfreebsd n'est pas encore supporté). Les instructions d'installation manuelles sont par ici. Pour les autres méthodes (iso ou images raspberry pi) c'est par là.
Ensuite concernant la migration de mes données, voici un petit résumé :
Migration des domaines et comptes
Yunohost permet à travers l'interface web de configurer plusieurs domaines et comptes utilisateurs. Il m'a donc suffit de les recréer. Les alias de messagerie ne sont pas oubliés, ce qui est un excellent point.
Migration des e-mail
J'ai tenté de copier mon /var/mail et de reconfigurer les droits, mais cela n'a jamais fonctionné, pour une raison inconnue Dovecot n'arrivait pas à écrire. J'ai donc du faire une sauvegarde des mails de l'ancien serveur à travers Thunderbird (copie dans le dossier local), puis les restaurer sur le nouveau serveur.
Migration Jabber
J'ai copié le contenu de /var/lib/prosody de l'ancien serveur sur /var/lib/metronome du nouveau serveur. Metronome est un fork de prosody et il est totalement compatible avec pour le moment. Le fait de copier ce répertoire permet de récupérer la liste de contacts.
Allons-y !
J'aime beaucoup le projet Yunohost, il m'évite de devoir configurer un annuaire ldap et y rattacher tous les services, le gain de temps est énorme. De plus son interface web est très bien pensée, dynamique, et la facilité à installer les applications tierces et déconcertante.
Je vous encourage fortemment à l'essayer, vous serez conquis !



